
Nvidia announced a suite of technologies to enhance humanoid robot development, including the Nvidia Isaac GR00T N1, the first open, fully customizable foundation model designed for human-like reasoning and skills. This announcement took place during Jensen Huang’s keynote at the GTC 2025 event.
Nvidia GR00T N1 and its capabilities
The Nvidia Isaac GR00T N1 foundation model introduces a dual-system architecture inspired by human cognition. “System 1” acts as a fast-thinking action model emulating human reflexes and intuition, while “System 2” serves as a slow-thinking model for methodical decision-making. Powered by a vision language model, System 2 examines the environment and instructions to devise actions, which System 1 then executes as precise robot movements.
GR00T N1 has the ability to generalize across various tasks, including grasping and moving objects, as well as performing multistep tasks that require contextual understanding and the combination of general skills. These capabilities are applicable in fields such as material handling, packaging, and inspection. Researchers can further train GR00T N1 using real or synthetic data tailored to specific humanoid robots or tasks.
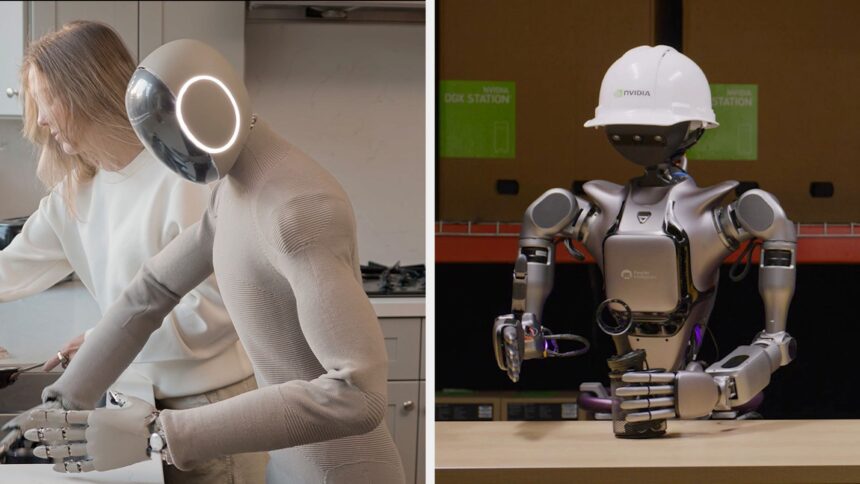
In his keynote, Huang showcased 1X’s humanoid robot autonomously completing domestic tidying tasks based on a policy built on GR00T N1. “The future of humanoids is about adaptability and learning,” stated Bernt Børnich, CEO of 1X Technologies. He emphasized that Nvidia’s GR00T N1 model is a significant advancement in robot reasoning and skills, enabling the development of robots as companions rather than mere tools.
AI at warp speed: Nvidia’s new GB300 superchip arrives this year
Collaboration on physics and data generation
Nvidia also partnered with Google DeepMind and Disney Research to develop Newton, an open-source physics engine designed to help robots perform complex tasks with precision. Built on the Nvidia Warp framework, Newton is optimized for robot learning and will work with simulation frameworks such as Google DeepMind’s MuJoCo and Nvidia Isaac Lab. Additionally, the collaboration aims to implement Disney’s physics engine into Newton.
Google DeepMind and Nvidia are working on MuJoCo-Warp, expected to enhance robotics machine learning workloads by over 70 times, and this technology will be accessible through Google DeepMind’s MJX open-source library as well as via Newton.
Disney Research plans to utilize Newton to enhance its robotic character platform, which includes next-generation entertainment robots like the Star Wars-inspired BDX droids, which were highlighted during Huang’s presentation. “This collaboration will allow us to create a new generation of robotic characters that are more expressive and engaging,” remarked Kyle Laughlin, senior vice president at Walt Disney Imagineering Research & Development.
Nvidia introduced the Isaac GR00T Blueprint for synthetic manipulation motion generation, aimed at addressing the need for large, diverse datasets for robot development. This blueprint allows developers to create vast amounts of synthetic motion data from limited human demonstrations, generating 780,000 synthetic trajectories in a short timeframe.
The combination of synthetic and real data improved GR00T N1’s performance by 40%. Nvidia is releasing the GR00T N1 dataset as part of an open-source physical AI dataset, now available on Hugging Face.
Nvidia GR00T N1 training data and task evaluation scenarios can now be downloaded from Hugging Face and GitHub. The Nvidia DGX Spark personal AI supercomputer, announced during the event, provides developers with a system to enhance GR00T N1’s capabilities across new robots, tasks, and environments. The Newton physics engine is anticipated to be released later this year.
During GTC 2025, Nvidia will host Humanoid Developer Day sessions focused on various aspects of humanoid robotics, including in-depth discussions on the Nvidia Isaac GR00T, insights into Disney’s Robotic Character Platform, and announcements regarding Mujoco-Warp and Newton.
Featured image credit: Nvidia


