


Robots are usually unsuitable for altering different tasks and environments. General-purpose models of robots are devised to circumvent this problem. They allow fine-tuning these general-purpose models for a wide scope of robotic tasks. However, it is challenging to maintain the consistency of shared open resources across various platforms. Success in real-world environments is far from guaranteed; pre-trained models cannot always be relied upon. Though collaboration fosters improvement in robotic intelligence, fully adaptable yet reliable models are still a distant dream.
Currently, robotic control relies on task-specific models, which lack adaptability and struggle to generalize across different tasks and platforms. These methods limit flexibility because other models are needed for each task, and it is inefficient to integrate across robotic systems. Compatibility across different platforms remains a major challenge because existing approaches often fail to perform consistently in diverse environments. Practical reliability remains uncertain, and many attempts to fine-tune models for new tasks may not succeed, highlighting the limitations of current robotic learning techniques.
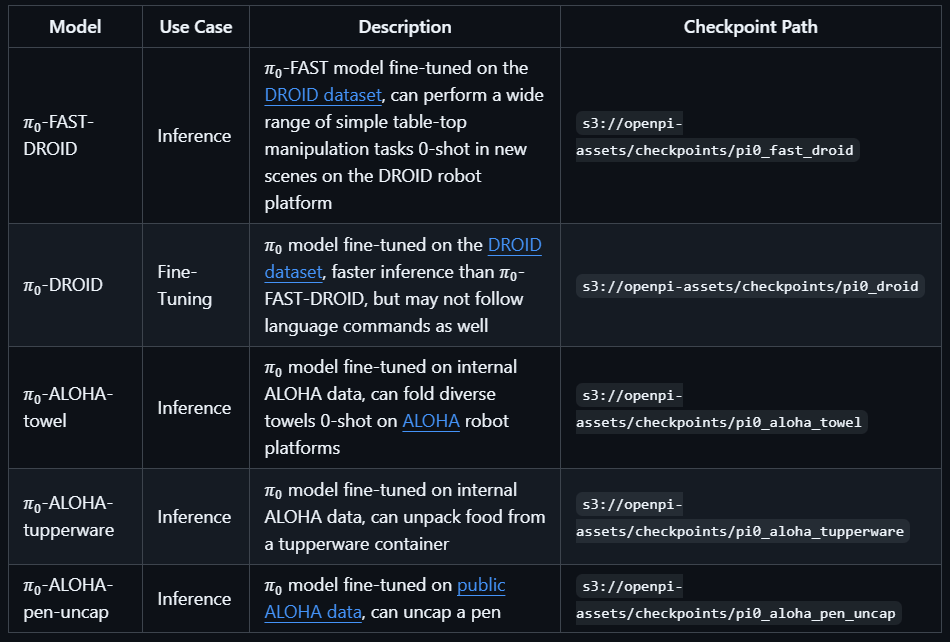
To mitigate these issues, researchers proposed π0, a robotic foundation model designed for general-purpose control across different robots and tasks. Unlike task-specific models lacking flexibility, π0 integrates vision, language, and action using a flow-based diffusion approach. The model is trained on over 10,000 hours of robot data and provides pre-trained checkpoints for fine-tuning on specific platforms. π0-FAST, an alternative version, follows language instructions more accurately but requires higher inference time. The open-source release of π0 allows researchers to fine-tune it for their robots, though its performance may vary across platforms.
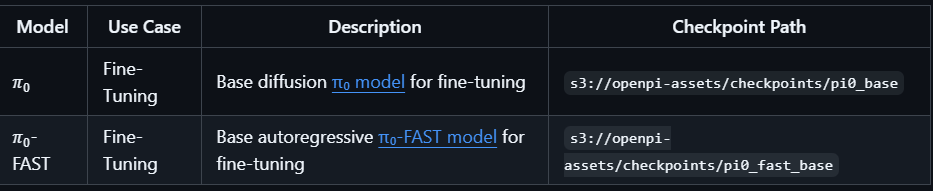
The framework consists of pre-trained models and fine-tuning capabilities, enabling adaptation to various robotic tasks like cleaning, folding, and object manipulation. The open repository contains model weights, example codes, and fine-tuned checkpoints for DROID and ALOHA platforms. Fine-tuning usually depends on 1 to 20 hours of data but on the robot and the task. It is expected that by making π0 available, the researchers would help in greater advances in robotic learning and AI systems that could understand real-world interactions. However, it is uncertain for all of the above platforms, and adaptation challenges still exist.
In the end, the open-sourcing of π0 enables general-purpose robotic foundation models to adapt to complex tasks and various platforms. It is not widely applicable but encourages experimenting and collaborating in robotic learning. As a baseline for future research, π0 can provide insights into AI-driven robotic interaction that leads to advanced generalization, efficient fine-tuning, and even greater autonomy.
Check out the Details and GitHub Page. All credit for this research goes to the researchers of this project. Also, don’t forget to follow us on Twitter and join our Telegram Channel and LinkedIn Group. Don’t Forget to join our 75k+ ML SubReddit.
 Recommended Open-Source AI Platform: ‘IntellAgent is a An Open-Source Multi-Agent Framework to Evaluate Complex Conversational AI System’ (Promoted)
Recommended Open-Source AI Platform: ‘IntellAgent is a An Open-Source Multi-Agent Framework to Evaluate Complex Conversational AI System’ (Promoted)The post π0 Released and Open Sourced: A General-Purpose Robotic Foundation Model that could be Fine-Tuned to a Diverse Range of Tasks appeared first on MarkTechPost.


